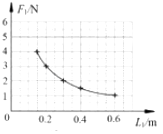
得出杠杆的平衡条件“动力×动力臂=阻力×阻力臂”后,小明又进一步探究杠杆平衡时动力和动力臂的关系.实验过程中,保持阻力和阻力臂不变,在杠杆水平平衡时,测出多组动力F1和动力臂L1的数据,并绘制了F1与L1的关系图象,如图所示,请根据图象推算,当L1为0.1m时,F1为 N.
微信扫码预览、分享更方便