试题
试卷
试题
首页
充值中心
开通VIP会员
特惠下载包
激活权益
帮助中心
登录
注册
当前位置:
高中通用技术
/
综合题
1.
(2021·丽水、湖州、衢州模拟)
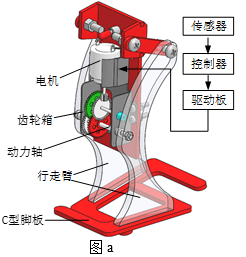
图a为某简易机器人行走控制系统的示意图,由步行机械装置、驱动板、控制器、传感器等组成。电机的动力经过齿轮箱变速后,由动力轴驱动左右行走臂交替摆动模拟人的步行前进,当传感器检测到前方有障碍物时会停止行走。请根据示意图和描述,完成以下任务。
(1) 该系统的控制方式属于
(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);当前方出现障碍物时,机器人停止行走,出现障碍物
(在“A .不是干扰因素;B .是干扰因素”中选择合适的选项,将序号填入横线处);
(2) 图a中动力轴的设计,以下方案中最合理的是
(在下列选项中选择合适的选项,将序号填入横线处);
A .
B .
C .
(3) 设计系统时需要对电机、驱动板以及传感器等部件的参数进行计算、设置和反复调试,体现了系统分析的
(在“A .整体性原则;B .综合性原则;C .科学性原则”中选择合适的选项,将序号填入横线处);
(4) 图b中标注的“螺丝”要和相应的螺母配合才能可靠安装行走臂,下列选项中合理的是
(选择合适的选项,将序号填入横线处)。
A .
B .
C .
D .
微信扫码预览、分享更方便
使用过本题的试卷
浙江省丽水、湖州、衢州三地市2021届高三下学期通用技术4月教学质量检测(二模)试卷
 B .
B .  C .
C . 

 C .
C .  D .
D . 


