表一:
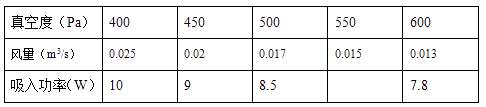
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二。真空度指主机内部气压与外界的气压差。风量指单位时间内通过吸尘电机排出的空气体积。吸尘电机吸入功率与输入功率的比值叫做效率。
表二:
微信扫码预览、分享更方便