22.
(2023·榆树模拟)
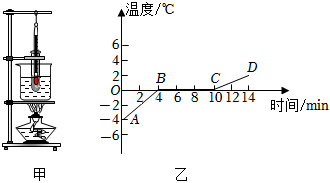
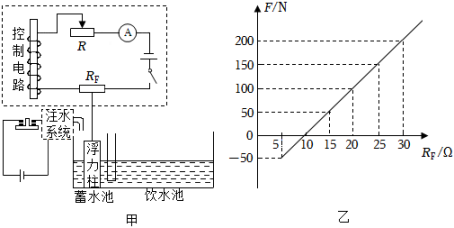
图甲是一款奶牛饮水自控模型装置的工作原理图。其中蓄水池和饮水池高均为120cm。柱形“浮力柱”重50N,底面积500cm
2 , 下端与蓄水池底部接触但没有弹力,高115cm,上端通过轻质连杆与力传感器R
F相连(固定在一起)。已知滑动变阻器R的规格为“30Ω 0.5A”,电流表量程0﹣0.3A,力传感器受到的力F与阻值R
F的变化关系如图乙。控制电路电源电压U=6V,当电磁铁线圈中的电流I>0.1A时,衔铁K被吸上,注水系统开始注水;当电磁铁线圈中的电流I≤0.1A时,衔铁K断开,停止注水。(电磁铁线圈的电阻忽略不计,ρ
水=1.0×10
3kg/m
3 , g=10N/kg)

 B .
B .  C .
C .  D .
D .