一、选择题(本大题10小题,每小题3分,共30分)在每小题列出的四个选项中,只有一个是正确的,请把正确的答案写在答题卡.
-
-
-
-
-
-
-
7.
(2025九下·婺城开学考)
我国的北斗卫星导航系统中有一颗中高轨道卫星高度大约是21500000米.将数字21500000用科学记数法表示为( )
-
A . 2
B .  C . 4
D .
C . 4
D . 
-
9.
(2024九下·肇庆月考)
我国古代数学名著《九章算术》中记载了一个问题,大意是:有几个人一起去买一件物品,每人出9元,多4元;每人出8元,少5元.问有多少人?该物品价值多少元?如果设有人,该物品值

元,那么可列方程组为( )
-
10.
(2024九下·肇庆月考)
如图,抛物线

的图象经过点

, 且与轴交于点

, 其中

, 则在结论①

;②

;③

;④

中,正确的个数有( ).

A . 1个
B . 2个
C . 3个
D . 4个
二、填空题(本大题6小题,每小题3分,共18分)
-
-
-
-
-
-
16.
(2024九下·肇庆月考)
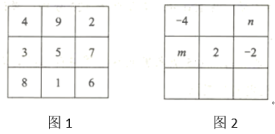
幻方的历史很悠久,传说最早出现在夏禹时代的“洛书”.把洛书用今天的数学符号翻译出来,就是一个三阶幻方(如图1),将9个数填在3×3(三行三列)的方格中,如果满足每个横行、每个竖列、每条对角线上的三个数字之和都相等,就得到一个广义的三阶幻方.图2的方格中填写了一些数字和字母,若能构成一个广义的三阶幻方,则mn=
.
三、解答题(一)(17、18每题4分,19、20每题6分,共20分)
-
-
-
-
20.
(2024九下·肇庆月考)
一人一盔,安全守规,为保证市民安全出行,某商店以每顶50元的价格购进一批头盔,售价为每顶80元时,每月可售出200顶,在“创建文明城市”期间,计划将头盔降价销售,经调查发现:每降价1元,每月可多售出20顶,若该商店每月获得的利润为8000元,求每顶头盔的售价是多少元?
四、解答题(二)(21题8分,22、23每题10分,共28分)
-
21.
(2024九下·肇庆月考)
商店出售某品牌护眼灯,每台进价为40元,在销售过程中发现,月销量
(台)与销售单价(元)之间满足一次函数关系,规定销售单价不低于进价,且不高于进价的2倍,其部分对应数据如下表所示:
销售单价(元) | … | 50 | 60 | 70 | … |
月销量(台) | … | 90 | 80 | 70 | … |
-
-
(2)
当护眼灯销售单价定为多少元时,商店每月出售这种护眼灯所获的利润最大?最大月利润为多少元?
-
22.
(2024九下·肇庆月考)
《墨经》最早述及的小孔成像,是世界上最早的关于光学问题的论述,如图,根据小孔成像的科学原理,当像距(小孔到像的距离)和物高(蜡烛火焰高度)不变时,火焰的像高
(单位:

)是物距(小孔到蜡烛的距离)(单位:
)的反比例函数,当

时,

.

-
(1)
求
关于的函数解析式;
-
(2)
若火焰的像高为

, 求小孔到蜡烛的距离.
-
23.
(2024九下·肇庆月考)
如图,

中,

, 点

从点

出发沿边

向点B以

的速度移动,点Q从B出发沿边BC向点

以

的速度移动,

两点同时出发,当一点到达终点时另一点也停止运动,设运动时间为

.

-
(1)
若
两点的距离为

时,求的值?
-
(2)
当为何值时,∆BPQ的面积最大?并求出最大面积.
五、解答题(三)(本大题2小题,每小题12分,共24分)
-
24.
(2024九下·肇庆月考)
视力表中蕴含着很多数学知识,如:每个“E”形图都是正方形结构,同一行的“E”是全等图形且对应着同一个视力值,不同的检测距离需要不同的视力表.

-
(1)
素材1:国际通用的视力表以5米为检测距离,任选视力表中7个视力值
n , 测得对应行的“E”形图边长
b(mm),在平面直角坐标系中描点如图1.
探究1:检测距离为5米时,归纳n与b的关系式,并求视力值1.2所对应行的“E”形图边长.
-
(2)
素材2:图2为视网膜成像示意图,在检测视力时,眼睛能看清最小“E”形图所成的角叫做分辨视角,视力值与分辨视角(分)的对应关系近似满足

.
探究2:当 时,属于正常视力,根据函数增减性写出对应的分辨视角的范围.
时,属于正常视力,根据函数增减性写出对应的分辨视角的范围.
-
(3)
素材3:如图3,当确定时,在
A处用边长为

的I号“E”测得的视力与在
B处用边长为

的Ⅱ号“E”测得的视力相同.
探究3:若检测距离为3米,求视力值1.2所对应行的“E”形图边长.
-
25.
(2024九下·肇庆月考)
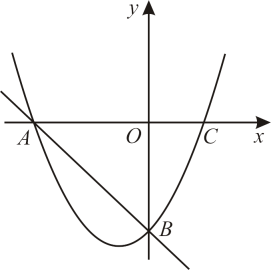
如图,在平面直角坐标系中,抛物线

(a≠0)的图象与x轴交于A、C两点,与y轴交于点B,其中点B坐标为(0,-4),点C坐标为(2,0).
-
-
(2)
点D是直线AB下方抛物线上一个动点,连接AD、BD,探究是否存在点D,使得△ABD的面积最大?若存在,请求出点D的坐标;若不存在,请说明理由.
-
(3)
点P为该抛物线对称轴上的动点,使得△PAB为直角三角形,请求出点P的坐标.






